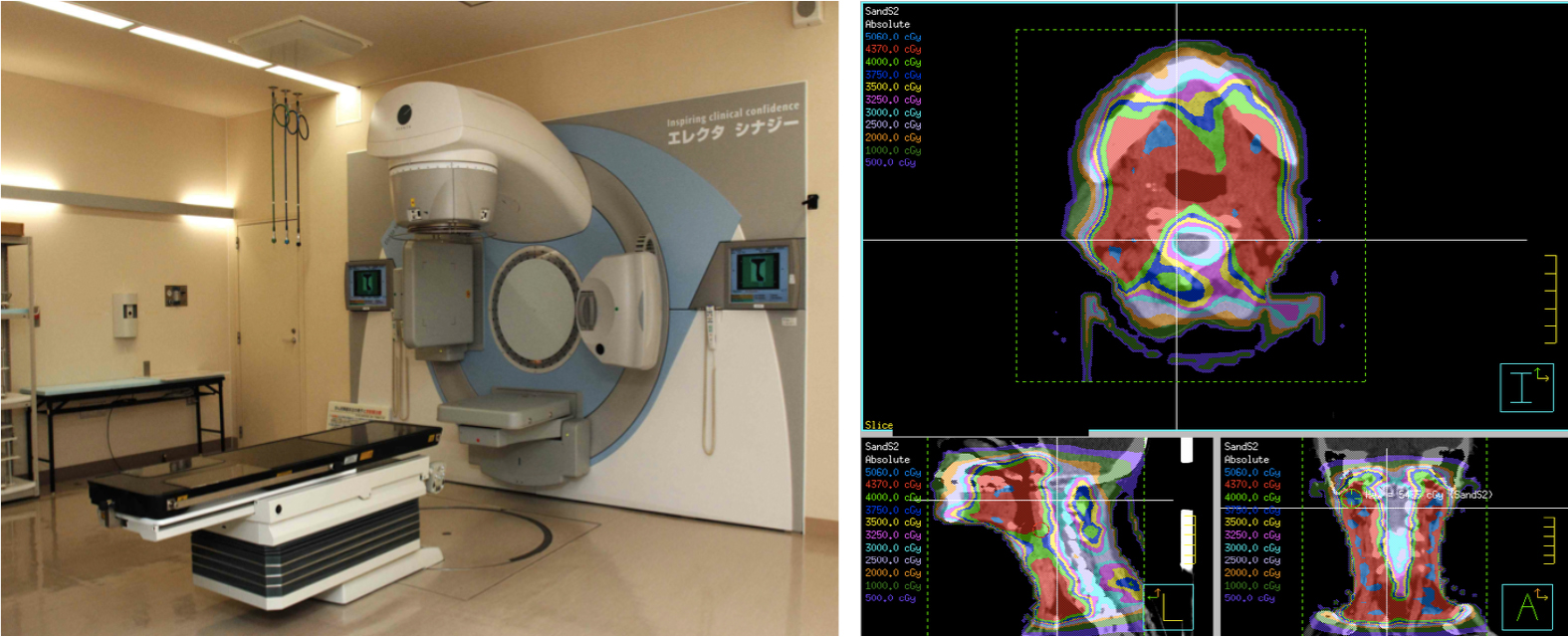
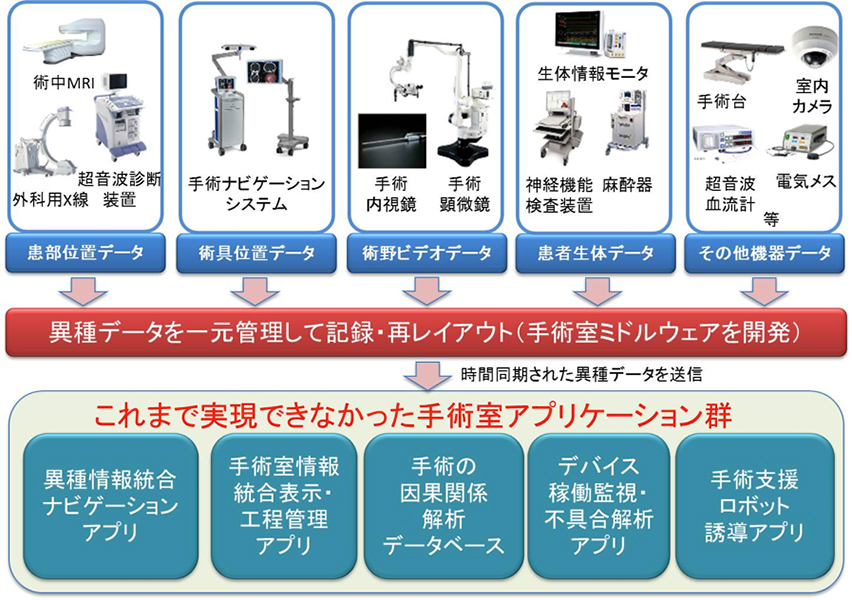
STANDARD7:治療の支援・手術ロボットについて ・治療の支援とは 病院で診察を受け治療が必要になったとき,その傷病の種類や患者の状態に応じて様々な治療法が選択されます.投薬治療,理学療法,化学療法,放射線治療,外科手術など,実に様々なものがあります.特に,放射線を正確に照射してがん細胞を破壊する「放射線治療」,患部を切り開いて病変の切除を行ったり,機能を回復するために臓器・組織の形成を行ったりする「外科手術」は,コンピュータやロボットなどテクノロジーの進歩とともに発展してきました.これらのテクノロジーは,治療を正確・精密にして安全な治療を実現すると同時に,治療としての効率化を高めて患者が早期に社会復帰できることを目的にしています. 例えば,病変を切除するために大きく腹部をメスで切り開くよりも,腹部に小さく開けた穴から内視鏡や手術器具を挿入して行う方が手術後の回復に要する時間は短くなります.しかし,狭い空間の中で各種の作業を行わなければならないので,手術としての難易度は高くなり,これを支援する様々な技術が必要となります. ここでは,これらをコンピュータやロボットなどのテクノロジーで実現する治療支援技術について紹介します. ・治療を支えるテクノロジー がんを正確に狙い撃ちする放射線治療は,X線CTやMRIなどの画像(参照:医用画像)を「地図」として治療の計画を立てます.放射線を照射するとがんだけでなく正常な組織にもダメージを与えますので,重要な臓器や組織にはなるべく当てないように照射の方向や強さ,回数などを決定する必要があります.したがって,照射は医用画像上で作成された周辺の重要な組織(*1)を含む地図の上でコンピュータによるシミュレーションを行うなど,緻密に計画を立てることによって実現されます.実際の治療では,地図上で計画された照射を正確に実行するために,ロボットによる照射装置や患者ベッドの制御が行われます(図1). 図1 患者ベッドや照射装置が精密にコントロールされる放射線治療装置と治療計画(放射線照射のシミュレーション結果).画像提供:東大病院放射線治療部門. 一方,外科手術においても,すでに一部の手術でロボットが使用されています.手術助手に代わって内視鏡の操作を行うロボット,精密な手術操作を行えるように外科医の体を支えるロボット,また外科医が遠隔操作を行うことで手術を行うロボット(図2)など,様々なロボット技術が導入されています. 図2 遠隔操作が可能な手術ロボット「da Vinci」.© Cmglee また,外科手術を支援する上でもう一つ重要なテクノロジーがあります.それは,外科医が手術の現在の状況を正確に把握するための情報を提供する技術です.これまでの手術でも欠かせなかった手術中の患者の血圧や心電図などの生体情報に加えて,現在切り開いている周辺に傷つけてはならない重要な血管はないか,また患部の奥にはどのような組織が存在するか,これまで腫瘍の何%を摘出できているかなど,時々刻々と変化する状況を正確に把握するための情報が必要です. この情報提供を行う技術は,特に「手術ナビゲーション」と呼びます.自動車のナビゲーションと同じく,手術操作をしている部位や周辺の組織構造(*2)を医用画像の地図上に表示したり,手術前とは異なる患部の状態を手術室内のMRIで撮影したりなど,手術中に様々な情報を提供する技術があります. これらの様々な技術の発展により,手術に使用する機器や手術中に得ることができる情報は年々増加しています.そこで新たな課題として,変化する豊富な情報に基づく手術の工程を管理したり,手術中の様々な情報を記録しておき手術後に解析したり,といった従来の手術室では不可能であったことが求められるようになりました. これらを実現するのが「スマート手術室」(図3)で,様々な情報を一元管理することで初めて可能となる,様々な新しい支援技術も生み出されています. 図3 スマート手術室の開発コンセプト. ・「スマート手術室」 「スマート治療室」とは,東京女子医大が開発している最先端の手術室(*3)で,手術室内の様々な機器から得られる情報がネットワークを通じて収集され,すべての記録を残しつつ手術室の医療チームに瞬時かつ的確に提供されるような機能が実現されています.英語では「SCOT(Smart Cyber Operating Theater)」と呼ばれます.従来の手術室の「機器を搬入して治療を行うスペースのみを提供する」という役割から,明確な機能を持つシステム化された「一つの医療機器」として統合された手術室がスマート手術室です(図4).手術が効率よく進められるよう,機器の配置などにも細心の注意を払って機能的に設計されています(*4).様々な機器から送られる情報が集中管理され,すべての情報が外科医の前のモニタに表示されます. 図4 東京女子医大のスマート手術室(右手奥のMRIや手前の手術ロボットなどの機器が効果的に配置されている). スマート手術室では,機器からの情報の提示だけでなく機器の操作にも最新テクノロジーが使用されています.執刀を行う外科医は,直接患部に触れる手を含め,厳しい基準の清潔さが求められます.したがって,清潔さが管理されていない機器などに直接触れることはできません.従来は,機器の操作を手術助手などが担当していましたが,スマート手術室ではジェスチャーにより非接触で執刀医の思い通りに機器をコントロールするインターフェイス「Opect」が開発され,使用されています(図5). 図5 OPECTによる直観的な術中画像操作. また,脳神経外科では,顕微鏡を使用した手術が一般的で,1mm以下の血管を0.02 mmの糸で縫合するなど,精密な操作を長時間にわたって行う必要があります.誤った操作をすると重大な事故に直結するため,精神的・肉体的に過酷な作業です.これを解決するのが「インテリジェント手台(iArmS)」です(図6).これは,精密な作業を続ける外科医の姿勢をサポートするロボットで,疲労を軽減して動作の確実性を向上させることが確認されています. 図6 インテリジェント手台:iArmS(*4). 以上で紹介したものを含め,様々なテクノロジーに基づく機器を統合したスマート手術室により,安全で高い治療効果の得られる精密医療が実現できると期待されています. *1 脳に対する放射線治療の場合,手足の運動を司る重要な神経線維を避けるための情報としてTractographyが使用されることがあります. *2 脳の外科手術でも放射線治療と同様にTractographyが重要なナビゲーション情報として使用されます. *3 日経デジタルヘルス:これが東京女子医大「スマート治療室」の全貌だ “シアター型手術室”に見た外科医療の未来 *4 優れた設計を対象とした「グッドデザイン賞(2016年度)」を受賞しています. *5 図3〜6の画像は以下の文献より著者の了解を得て引用しました. 正宗賢,村垣善浩,他,"先端工学外科学の展開Smart Cyber Operating Theater (SCOT)のプロジェクト展開を軸とした国産医療機器創出基盤の構築に向けて",未来医学28, pp.53-66, 2015 前の内容:AI・機械学習について 次の内容:生体計測について





{kind=link}