講演1
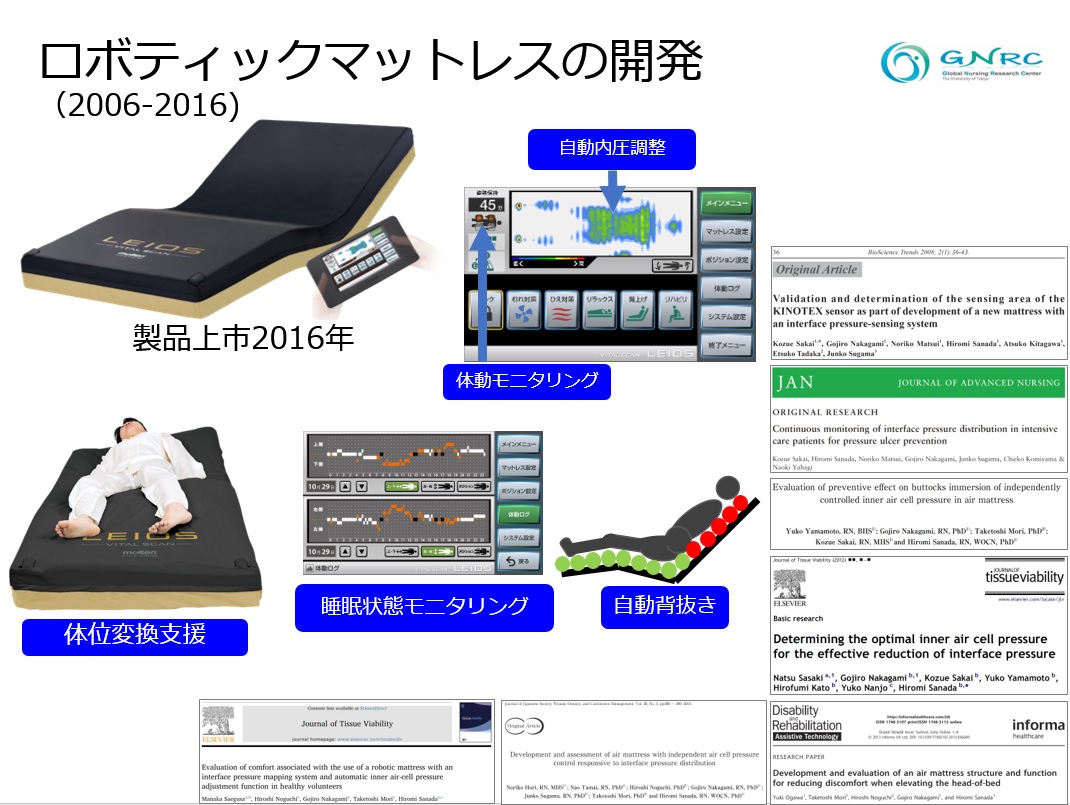
看護理工学 – 我慢させない入院生活のためのものづくり
真田 弘美 先生
東京大学
大学院医学系研究科
皆さんは病院に入院したことがありますか。その目的は、病気を治すためであったり、痛みなどの症状を緩和するためであったり、いずれにしても心身ともに休息する場所が病院です。つまり病院は療養するための生活の場といえます。入院すると検査や治療などで、食事、排泄、睡眠など今まで普通にしてきた生活ができず、強い不安やストレスを感じることがたびたび生じます。さらに、認知症などで、他人とコミュニケーションすることが難しくなった方々は、自分の症状を訴えることができずに、夜間不眠状態や自分の居場所が分からなくなり徘徊することもあります。我々が専門とする看護学は、このような方々が入院しても、我慢せずに快適に療養生活を送れるように支援技術を開発することができます。
技術開発には、工学、生理学、情報科学など他領域の学問との融合が必須となります。そこで、ここでは看護理工学を基盤にしたものづくりを含めて我慢しない療養生活の実現をどのように図るか概説します。
参考HP
1) http://www.rounenkango.m.u-tokyo.ac.jp/
2) http://gnrc.m.u-tokyo.ac.jp/
1) http://www.rounenkango.m.u-tokyo.ac.jp/
2) http://gnrc.m.u-tokyo.ac.jp/
東京大学大学院医学系研究科 健康科学・看護学専攻 老年看護学/創傷看護学分野 の紹介は こちら
講演2
低侵襲手術を支援するロボティックシステム
小林 英津子 先生
東京女子医科大学
先端生命医科学研究所
近年、外科手術では患者の負担を少なくする低侵襲手術が盛んに行われるようになっている。これは、手術時に正常な組織の損傷を極力少なくすることで、術後の痛みを和らげ、早期回復を目指すものである。一方、術者にとっては制約の多い中での手術となるため、負担が多く熟練を要するものとなっている。そこで我々はこの低侵襲手術に対し、工学技術を用いて支援すべく、手術支援ロボット・デバイスの開発研究を行ってきた。手術支援ロボット・デバイスでは、特殊な環境下での操作が可能で、安全性の高いシステムを実現する必要がある。また、医学研究者と工学研究者とのスムースな連携も重要である。本発表では、以上を踏まえ、講演者がこれまで行ってきた研究を紹介する。具体的には、内視鏡操作ロボット、脳外科手術支援用ロボット、膀胱腫瘍切除術用デバイス、足の外科手術を対象とした術中足底圧分布測定システム、さらに東京女子医科大学で取り組んでいるインテリジェント手術室プロジェクトや医工連携研究推進事業などについて紹介する。

参考HP
1) https://www.tandfonline.com/doi/pdf/10.3109/10929089909148172
2) http://www.twmu.ac.jp/ABMES/FATS/
1) https://www.tandfonline.com/doi/pdf/10.3109/10929089909148172
2) http://www.twmu.ac.jp/ABMES/FATS/
東京女子医科大学 先端生命医科学研究所 の紹介は こちら
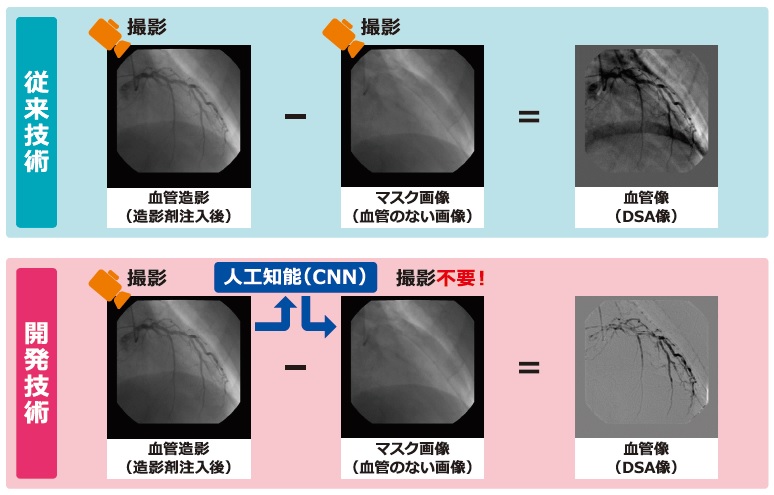
講演3
人工知能技術を使った血管抽出法の紹介
山本 めぐみ 先生
広島国際大学
保健医療学部診療放射線学科